
Vorrei proporre qualche, spero utile, spunto didattico tratto dalla mia esperienza circa l’impiego della robotica nell’ambito della disciplina Sistemi Automatici e di alcuni corsi che ho avuto il piacere di condurre presso l’Istituto Tecnico “G.Malafarina” di Soverato dove attualmente lavoro.
Cercherò di far questo argomentando su quello che, secondo me, è il significato più opportuno da attribuire ai termini Robot e Robotica non in un contesto qualsiasi ma piuttosto in ambito strettamente scolastico.
Partiamo da Robot.
Noi insegnanti, prima di affrontare una lezione, predisponiamo, in genere, una mappa mentale, più o meno definita, sicuramente rilocabile, duttile, tale da essere facilmente adattabile; ciò che l’attore di teatro definirebbe, diciamo, un “canovaccio”. Il bravo docente però, sa bene che in questo caso gli attori sono gli alunni. Ed ecco che entra in “scena” (tanto per rimanere in tema) il Robot.
La definizione di Robot che, in ambito scolastico, io darei, è la seguente: piccolo sistema automatico grazie al quale l’insegnante può impartire nozioni secondo la pratica dell’apprendere dal fare.
Tuttavia, a mio avviso e per esperienza personale, la lezione sarà tanto più coinvolgente quanto maggiore sarà la partecipazione dei ragazzi alle diverse fasi progettuali e realizzative del Robot. L’insegnante dovrà essere così valente da coinvolgere gli alunni nei vari stadi di sviluppo qualunque sia il loro livello di conoscenza tecnica, mediando ed operando le opportune semplificazioni concettuali o pratiche. Tanto più gli alunni saranno partecipi alla creazione del Robot, tanto più facile sarà la comprensione dei fenomeni fisici che osserveranno, tanto maggiore sarà l’interesse che dimostreranno.
Ci sono, inoltre, a mio avviso, altri aspetti fondamentali e degni di nota inerenti il coinvolgimento dei ragazzi nelle diverse fasi realizzative di un piccolo robot didattico. Ciascuno, infatti, secondo le proprie capacità, potrà sentirsi partecipe di un progetto comune, provando l’esperienza (così importante nella realtà aziendale ad esempio) del lavoro in team e per obiettivi. Inoltre, non è infrequente riscontrare un aumento dell’autostima ed un miglioramento dei rapporti di classe tra i diversi alunni coinvolti, oltre che, naturalmente, l’atteso perfezionamento della competenza prettamente tecnica. Insomma, a mio avviso, è una stupenda occasione per liberare l’espressività dei nostri alunni: c’è il piccolo mago informatico, chi sa realizzare cose stupende dal punto di vista meccanico, chi è bravo nel sistemare i fili, ecc.
L’aspetto interessante, quindi, dell’approccio robotico è che, di fatto, la lezione inizia già con l’affrontare insieme agli alunni le funzionalità che il prototipo dovrebbe avere.
Arrivati a questo punto ci si potrebbe, a giusta ragione chiedere: ma, lezione su cosa?
E qui entra in gioco il termine Robotica. A me piace pensarla così: la scienza che racchiude più scienze.
Quali? Direi che abbiamo solo l’imbarazzo della scelta. Andiamo con ordine:
Elettronica. Un robot è un concentrato di dispositivi elettronici. Avremo sempre a che fare con schede dotate di microcontrollore cui collegheremo diversi componenti per l’interazione con il mondo esterno. Si pensi allo sterminato insieme di trasduttori quali termocoppie, fotocellule, giroscopi, sensori ad ultrasuoni e così via. Questi ultimi, uniti allo studio del comportamento dinamico del robot, offriranno spunti praticamente infiniti anche per i vostri esperimenti di Fisica.
Inoltre, un sistema automatico deve essere programmato. Trattiamo quindi argomenti fondamentali per l’apprendimento dell’informatica ma con un approccio differente dalla programmazione standard finalizzata soltanto all’applicativo PC o mobile. Abbiamo infatti l’opportunità di verificare dal comportamento nel mondo fisico, cioè il nostro e non quello virtuale, la correttezza di un certo algoritmo.
Inoltre lo studio della Matematica (il funzionamento richiede la corretta applicazione di formule) e della Geometria (la struttura stessa del robot o le sue evoluzioni nello spazio possono essere progettate o analizzate dal punto vista geometrico), l’approfondimento della lingua Inglese (a causa dell’indispensabile conoscenza della terminologia tecnica), possono trarre vantaggio dall’uso della robotica in classe.
Infine, lo studio del comportamento del robot, in quanto sistema programmato dall’alunno che lo avrà dotato di capacità decisionale, potrà fornire certamente spunti utili anche per materie non strettamente tecniche quali la Filosofia e la Psicologia.
Qualunque sia le disciplina, non sembra dunque insensato pensare che la robotica, intesa come sperimentazione attraverso il progetto e l’uso di un robot, possa fornire quella marcia in più per apprendere dal fare possibilmente divertendosi.
In questa rivista vedremo in dettaglio diverse tecnologie per realizzare piccoli sistemi robotici, servendoci anche di video ed esempi interattivi consultabili online.
In particolare tratteremo diffusamente di Arduino UNO R3 (scheda programmabile OpenHardware e OpenSource, dotata di microcontrollore ATMega320p, programmabile in C), del kit Lego Mindstorms (denominato attualmente EV3, basato su ARM9 con kernel Linux, programmabile con una versione dedicata di NI LabView), del microcomputer Raspberry PI3 (Quad Core Broadcom BCM2837 64bit CPU, programmabile in Python o C), nonchè di tutti i trasduttori, sensori, adattatori necessari al funzionamento e della parte relativa alla programmazione.
Per concludere vi lascio un paio di link in cui potete osservare alcuni piccoli robot in azione.
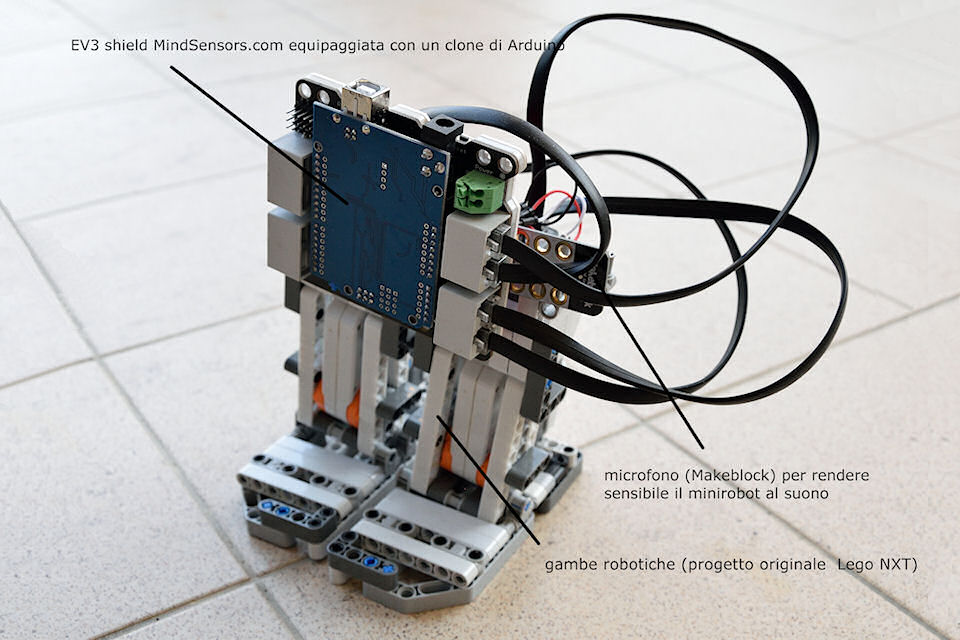
Qui troviamo un prototipo da me realizzato durante il periodo dell'orientamento nell'A.S.2016/17. Fu molto divertente azionarlo, i ragazzi ne rimasero entusiasti. Si tratta di un minirobot realizzato con una tecnologia mista, in grado di muoversi se vengono percepiti suoni. La parte meccanica è assemblata utilizzando i componenti Lego del kit Mindstorms (NXT per la precisione, la versione precedente alla attuale EV3, i mattoncini però sono identici), l'elettronica programmata è invece costituita da una shield (diciamo un adattatore, vedremo questo aspetto molto bene nei prossimi numeri) della Mindsensors contenente un clone della scheda Arduino. Normalmente per quest'ultima parte si usa il mattoncino "intelligente" della Lego, tuttavia ho voluto sperimentare qualcosa di nuovo. Il prototipo è dotato di un microfono (della Makeblock) grazie al quale è possibile percepire i suoni esterni.
In questo secondo video osserviamo le gambe robotiche mentre "portano a spasso" una sorta di mini robot-dog. Quest'ultimo è un progetto EV3 classico, ovviamente progammato in maniera opportuna; in questo caso in modo da seguire un oggetto in movimento.
Un arrivederci dunque ai prossimi articoli dove inizieremo ad occuparci della realizzazione pratica dei nostri piccoli giocattoli robotici.
Ing.Franco Babbo